

作者:上海交通大学邹慧君
摘要:本文主要研究机械方案创新设计过程。在简要介绍和分析机械方案设计一般过程和基于结构类型变异机构综合方法的基础上,提出集成功能推理和结构推理为一体的机械方案创新设计过程模型,并在此基础上开发了机械方案创新设计智能支持系统(MCIDISS)。 关键词:方案创新设计功能推理结构推理 引言 机械方案设计是一个创造性很强的活动,其思维过程是形象思维和抽象思维综合作用的结果。目前计算机辅助设计(CAD)主要解决了在计算和绘图等设计后续阶段对设计者的支持。而对于极富创造性的早期方案设计阶段的计算机支持至今没有取得实质性的进展。即使是智能CAD系统,所采用的方法的理论基础仍是基于传统的人工智能的知识表示与推理方法,即逻辑思维为基础,其中多以知识工程和专家系统的方法实现。这种CAD与AI的简单组合,没有也不可能从真正意义上实现方案设计自动化。创造性如何在方案设计过程中体现一直是困扰设计理论研究工作者的棘手问题,也一直没有很好地解决,本文将就这一问题作一探讨。 1机械方案设计的一般过程 一般认为,方案设计阶段主要有两个任务:首先是建立技术系统的功能结构。然后通过选择相应于功能结构中的每个功能的功能载体,并组合这些被选择的功能载体形成整个技术系统的设计方案。 通用设计理论认为,方案设计过程可表述为两个映射过程(图1):即用户需求域到功能域的映射以及功能域到结构域的映射。由需求域到功能域的映射过程最能体现设计者的创造能力,这一过程涉及到对设计思维规律以及创造性机理认识水平,涉及到自然语言到专业技术语言的转化。尽管有些学者提出通过对设计要求进行层次分解来建立功能结构图的讨论,但一般还要通过人工干预进行。从功能到结构的映射,实际上是功能结构图中的每一个分功能与能实现该分功能的结构进行匹配,一般情况下,总体功能往往包含着许多分功能。而每一功能可以由不同的结构来实现,因此存在组合、协调和评价筛选的问题。具体的机械方案设计过程如图2所示。{img}图2所示的机械方案设计过程还可通过数学形式进行描述。设总体功能为U,它可分解为一些子功能,分解过程可形式化为: U=(U1,U2,…Um) (1) 即总体功能是有m个子功能Ui(i=1,2,…m)组成的。 任何一个子功能Ui(i=1,2,…,m)对应着能够完成该分功能的子结构的集合Ti,即 Ti=(ti11,ti22,…,tin)(i=1,2,…,m) (2) 式中tij(j=1,2,…,n)对应于能完成子功能Ui的所有子结构,n为完成该子功能的子结构总数。如果用Ui定义行,tij为元素构成矩阵,即得到功能与结构相联系的“功能—结构技术矩阵”:

当然能够实现各子功能的子结构数并不相等,可以将能够实现某一子功能的最多子结构数定为n,少于这个数的子功能元素项用零表示。图2所描述的机械方设计的一般过程,看起来很简单,但计算机实现有许多问题需要解决。如总功能如何分解为子功能、功能如何表达(因为从不同的角度提出的功能表达词汇是不相同的)以及如何有效根据功能索引子结构等问题有待进一步探讨和研究。 2基于机构结构类型变异综合方法 自60年代图论理论首次被应用于机构设计以来,它在机构分析与综合方面的应用得到深入的研究。在图论中,封闭的图代表机构,顶点代表连杆,边代表运动副。图可以用矩阵(如邻接矩阵和关联矩阵)表示、分析和计算。1979年,Freudenstein和Maki提出“功能与结构分离”的方法用于机构综合,随后许多学者对这一方法进行研究和深化。该方法包括如下几个环节: 2.1根据用户的需求,提出机构创新设计任务与技术要求: (1)拓扑结构要求 如运动性质(平面运动或空间运动)、基本回路数(或独立环数目)、运动副类型及数目、构件类型及数目、主动副类型及其位置以及机架的构件类型及其位置; (2)功能性要求 如输出构件数目及其位置、每一输出构件的任务(如轨迹生成、函数生成、导引以及其它要求、满足对预定的速度及加速度要求、满足对机构整体的动力学性能要求; (3)约束条件 如运动精度、结构紧凑性、刚度、机械效益、轴销作用反力以及制造、装配、成本等方面的约束。 2.2结构类型综合 通过结构类型综合列出满足设计任务要求的全部结构类型并以适当形式表示。 2.3优选结构类型 根据功能要求和约束条件,筛选出好的结构类型。 该方法目前研究局限在平面连杆机构的结构类型综合,且一般集中在运动链同构识别、自由度识别方法以及平面运动链自动生成等理论方法研究阶段。尽管有一些应用的研究报道,但都是针对简单机构(如变冲程发动机活塞机构、车门开启机构等)通过人工方式实现。计算机实现还有一些关键技术没有很有效的方法,如运动链同构识别问题,主动副位置确定、机架位置的确定、杆组的自动划分以及对运动链进行评价筛选等问题。 3集成功能推理及结构推理的方案创新设计过程模型 如果用人工智能语言描述,在上述第1小节中讨论的机械方案设计的一般过程是基于功能推理方式,而第2小节中所讨论的机构结构类型变异综合方法是基于结构推理方式。这两种方式有其内在的联系,如何将这两种方式有机地联系在一起对于机械方案创新设计是一件很有意义的工作。功能推理主要解决功能到结构之间的映射,通过结构部件组合途径形成机械方案。而结构推理是从结构部件的拓扑结构上通过机构演绎(机架变换,主动件位置变换以及运动副类型变换)途径对机构进行变异创新,尽管目前结构推理局限在平面连杆机构结构类型综合,但通过本文的研究,该方法可以扩展到一般刚体机械方案创新设计。有鉴于此,作者提出如图3所示的集成功能推理和结构推理的机械方案创新设计过程模型。

该设计过程模型由以下主要步骤组成: Step1:功能结构图的建立。根据设计要求,建立功能结构图。 Step2:根据建立的功能结构图,寻找满足各子功能要求的功能载体并组合成为原始机械方案。 Step3:将原始机械方案进行抽象化为表达机械方案连接信息的运动链表示。并记录原始方案一些约束信息,如自由度数、杆数、原动件必须是几副杆、输出构件是否必须与机架相连等等。 Step4:运动链发散。列举所有与抽象化表示的运动链具有相同自由度、杆副类型以及杆数的非同构运动链,并进行筛选。 Step5:机械方案元型集的生成。对筛选的运动链进行机架识别、原动件识别、杆组识别,形成用连杆和转动副表达的机械方案元型。 Step6:候选方案集的生成。将以上生成的机械方案元型通过类型替代,形成候选方案集。 Step7:方案的评价决策。得到最优方案。 Step8:方案的尺度综合。 4机械方案创新设计智能支持系统 根据以上的过程模型,我们开发了机械方案创新设计智能支持系统MCIDISS。系统的结构如图4所示。该系统由五大模块组成:
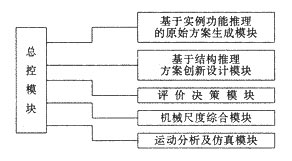
(1)基于实例功能推理的原始机械方案生成模块:该模块采用两级实例推理的模型,完成从设计任务到功能结构图的建立以及装置提取与组合协调设计生成原始机械方案的 任务。 (2)基于结构推理的方案设计创新模块:该模块在上面模块产生的原始机械方案的基础上,通过抽象化表示,将原始机械方案表达为一般化运动链,从机械方案拓扑联接上进行变异创新。 (3)评价决策模块:该模块主要任务是对各阶段的设计解进行评价决策。系统主要采用模糊综合评价决策方法。 (4)机构尺度综合模块:该模块主要任务是对组成机械方案的机构参数进行综合,以便从尺度上论证方案的可行性。 (5)运动分析及仿真模块:该模块是在完成机构尺度综合后,对其进行运动分析和仿真,以便使设计者对所设计的方案有一个清晰直观的认识。 5结束语 本文先简要分析了机械方案设计一般过程和机构结构类型综合的一般过程,在此基础上,研究并提出了集成功能推理和结构推理的机械方案创新设计过程模型。基于所提出的过程模型,作者开发了机械方案创新设计智能支持原型系统MCIDISS。MCIDISS开发和运行表明,其具有合理的知识库结构,运行情况稳定,用户界面友好,推理控制策略灵活,因此具有很好的实用性和较高的开发效率。































































































































热门推荐