

由于高空作业平台特殊的工作环境,安全性与稳定性是评价其工作性能的一个重要指标,而臂架变幅机构的平稳性是高空作业平台性能的主要考量。运想从臂架变幅机构工作特点入手,对臂架变幅结构及动力学进行了深入研究,为臂架变幅机构的平稳性研究奠定了基础。
高空作业平台臂架结构简介
运想26米高空作业平台的臂架变幅机构,其结构简图如图所示。

图示
26米高空作业平台结构简图:1.转台2.连杆3.基本臂4. 二市臂5.三节臂6.工作平台7.变幅油缸8.三角架
由结构简图可以看出,高空作业平台的臂架主要由臂架伸缩机构和臂架变幅机构组成。变幅机构由变幅油紅7、连杆2和三角架8组成,其中变幅油虹7与三角架8和基本臂3铰接,连杆2两端分别与转台1和基本臂3铰接,三角架8两端分别与转台1和基本臂3铰接。伸缩机构由三节臂架(基本臂、二节臂和三节臂)构成,其中基本臂和变幅机构的连杆2、三角架8、变幅油紅7铰接,三节臂和工作平台铰接。
高空作业平台的臂架伸缩机构
高空作业平台的臂架伸缩机构由基本臂1、二节臂7、三节臂6、伸缩油虹、伸缩臂钢丝绳3等组成,其结构简图如图2-2所示。
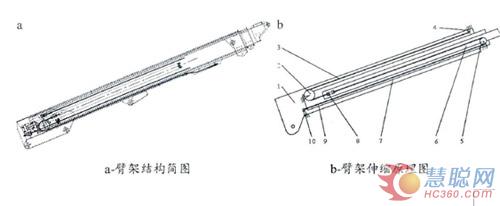
图2—2
高空作业平台的臂架伸缩通过伸缩油虹和钢丝绳的共同作用来实现,二节臂和三节臂的伸缩是同步的。伸缩油紅的活塞杆铰接在基本臂的底部,赶筒的中部较接在二节臂的末端。伸缩臂钢丝绳固定在基本臂和三节臂上,中间绕在固定于二节臂的滑轮。
当伸缩油紅无杆腔进油时,虹筒带动二节臂一起向外伸出,随着二节臂的伸出,滑轮5到钢丝绳在基本臂上的固定点10之间的距离增大,伸臂钢丝绳9绕过滑轮5拉动三节臂伸出。当伸缩油虹有杆腔进油时,赶筒带动二节臂一起缩回,随着二节臂的缩回,滑轮4到钢丝绳在基本臂上的固定点2之间的距离增大,缩臂钢丝绳3绕过滑轮2拉动三节臂缩回。
图为高空作业平台臂架伸缩机构:1.基本臂2,5.二节臂上的滑轮3.縮臂钢丝绳4.钢丝繞在基本臂上的固定点6.三节臂7.二节臂8.钢丝绳在三节臂上的固定点9.伸臂钢丝絕10.钢丝绳在基本臂上的固定点


































































































































热门推荐