

5G在网络承载、并发支持、通信延迟等方面实现了质的提升。5G移动通信提供NSA和SA模式两种通信组网方式,其中NSA模式采用双连接方式,5G NR控制面锚定于4G LTE,利用现有4G核心网EPC;而SA模式的5G NR直接接入5G核心网,是完整独立的5G网络。
本文所论述的5G移动通信网络是基于5G SA基础上做的产品方案设计。
与NSA不同,SA有5G核心网。在SA组网下,5G网络独立于4G网络,5G与4G仅在核心网级互通,互连简单;终端仅连接NR一种无线接入技术。相比SA,NSA缺了一个5G核心网,在网络承载、并发支持、通信延迟等关键指标上存在短板。
相比传统移动网络,5G移动通信优势在于自身的高速率、大流量、低延迟等特点。
高速率:5G理论传输速度可达4G的数百倍,用户端应用速率可达1Gbps。速度的大幅提升,可以进一步拓展基础信息的采集、上传、下载速度;5G移动接入速度可以达到500+km/h,有效解决车辆快速移动过程中通信基站接入的平滑切换问题。另外,5G目标是做到最大10Gbps,可以全面满足高清视频、虚拟现实、高速行驶、精准作业等大数据量传输要求,被带动的行业领域还有虚拟现实及增强现实,比如工程机械3D场景模拟、数据同屏、在线故障诊断等,可以通过虚拟现实进行展示,更加便利、生动。
大容量:5G网络拥有大容量低功耗特点,连接数密度支持100万/km²并发接入,流量密度支持10~100Tbps/km²,全面应用之后将降低连接成本。可想而知,在5G时代,移动通信不仅局限于娱乐领域,在工业场景应用方面也有着不错的价值。
低延迟:5G移动通信的空中接口时延水平在1ms左右,可以满足自动驾驶、无人作业、远程医疗等实时应用。其降低时延的策略主要从三方面进行优化:一是空口接入时延采用超短帧和提高载波本振频率源短期频率稳定度,二是承载网时延采取全光网G.Metro技术和单纤双向传输减少时延差,三是核心网时延采取优化转发路由和减少映射复用层次以及以网络下沉等实现低延迟。
可以预见,在传统移动通信网络面向服务人的范畴基础上,5G移动通信网络可以满足智能制造、V2X车联网、远程医疗、遥操作、高清摄像等行业细分市场需求,具备支持万物互联潜在能力。
5G行业应用价值
基于传统移动通信的车联网应用基本上集中在远程定位、远程锁车、远程解锁、远程启动、远程开关空调、远程升级等车辆非移动或作业相关的功能应用,缺失实时性数据通信状态下,对车辆的作业控制或行驶决策,为此车联网需要更低时延和更高可靠性的通信网络。一方面,车辆在作业或高速运动过程中,要实现车辆状态实时采集、作业控制、行驶决策、安全预警功能等,通信时延需要在ms级别;另一方面,出于安全驾驶或作业要求,相较于传统移动通信,车联网在辅助实时性作业和高速运动时,需要更高的可靠性。
2020年7月,第三代合作伙伴计划(3GPP)已正式宣布R16标准冻结,标志着5G将进入垂直行业的物联网发展新阶段。在车联网领域,R16标准全面支持车与车(V2V)和车与路侧单元(V2I)直连通信,满足车联网对作业控制、行驶决策的高速率、低延时、高可靠性等方面的严格要求,形成快速、安全、高效的V2X车联网应用。
5G不仅推动车联网的智能化应用,也将推动整车厂商业模式从单一车辆销售逐步转变成作业服务、出行服务、服务延保、UBI保险等增值服务模式。根据ABI Research预测,2025年5G连接的车辆将达5030万辆,汽车的典型换代周期是7~10年,因此,可以预见5G+工程机械市场规模将在2025-2030年间大幅增长。
行业实践及分析
行业实践情况
2019年4月,在德国慕尼黑宝马展上,韩国斗山(Doosan)首次展示了基于5G移动通信技术的洲际遥控方案。在德国遥控其在韩国的挖掘机,官方宣称数传延迟为20ms。德国慕尼黑距离韩国约为8500km,以光纤中光速200000km/s,忽略交换延迟,主干网传输最短时间为8.5K/200K=42.5ms。以5G空口1ms延迟计算收发端试验,总时延应不低于44.5ms,尽管其宣传成分较大,但成果仍超越了目前其他主流技术。使用5G在近距离(100km以内)遥操作工程车辆,时延可远低于目前的所有其他网络解决方案。
2019年3月,山东临工联合中国联通、中兴通讯,共同实施5G远程遥控挖掘机项目,通过中国联通5G网络与远端控制室相连,实时控制位于山东临工矿山综合实验基地的挖掘机,同步回传真实作业场景及视频。官方称整体数传信号时延25ms左右,视频信号时延300ms左右。
2019年6月,在移动世界大会(MWC)华为展台,华为、三一重工、跃薪科技三家公司联合展出了基于5G移动通信的车辆远程操控系统,在现场由一名操作工实时操控远在1200公里外的一台无人挖掘机,现场展示了车辆移动、旋转、挖掘等操作。根据现场情况估计,该系统图传时延约为250ms左右。另外,该系统在挖掘机外部配置了一个立杆摄像头,进行车辆现场情况的实时展示,挖斗和挖坑配有相应的摄像头进行拍摄,操作台前方专门配置了一个挖斗情况的实时展示屏。
行业实践分析
基于5G移动通信技术高频属性,在传输流量上是4G的20倍左右,但是每个5G基站覆盖范围在250m左右,而每个4G基站的覆盖范围大约是1000m左右。照此推算,每个4G基站的覆盖范围,需要大约4个5G基站来覆盖。截至2019年底,我国建成的4G基站440万个左右,如果将这些基站覆盖的范围全部用5G基站覆盖的话,那么全面建成5G网络所需要的5G基站至少要1800万个,5G的建设成本会数倍提高。较高建设成本决定了其前期部署一定是围绕城市、高速公路、矿山作业等特定范围或行业展开。
基于5G视频传输及远程控制操作已经成为各个主机厂科技研发的焦点,但是大部分集中在技术验证阶段,距离商业推广还有距离。
目标车辆周围场景监控,基本上是依靠外挂摄像头解决,目标场景固定,无法实现移动状态监控。
通信情况判断与安全保障策略缺失,上述几家的应用场景,基本上以演示为主,通信链路情况与车辆自主安全策略未见展示。
基本上处于现场人工启动、关闭发动机状态,需要现场人工介入较多,并未实现真正意义的远程操作。
基本上围绕单机监控实现,多类型车辆协同作业,还未见有落地应用。
5G遥操作解决方案
5G遥操作系统架构主要包含三个层面,即车辆端、网络层、云平台。通过多路径网络在车辆端和云平台之间实现数据传输,构建协同智能的远程操作支撑网络。车辆端主要包括车辆和车载设备(如雷达、摄像头、控制器、车载网关、5G CPE、定位设备等)。网络层基于4G、5G、CAN总线、车载以太网、光纤等构建信息传输网络,为车辆端与云平台之间搭建高速率、低延迟、高可靠性的通信链路,并支持拓展车辆间和车路间互联互通的网络架构。云平台则可以实现车辆远程驾驶管理、调度管理,3D模拟仿真、远程升级、远程故障诊断等。

系统拓扑架构
5G遥操作系统可以实现基于单车的远程无人操作,还可以为机群协同作业提供基础支撑。一方面可以远距离的控制和操作车辆进行作业,改善作业强度、降低环境影响、强化作业安全等,另一方面在多类型车辆无人状态下协同作业时,当车辆出现自身无法处理或者异常状况时,可以实施人工干预,通过实时感知和同屏展示,实时了解车辆状态及周边环境,对其进行人工远程驾驶操作,辅助机群快速解除障碍和问题,快速恢复协同作业。
技术实现路径:1.车辆端上配置多路采用AHD高清的1080P摄像头,其中,1路外置无线全景摄像头。2.车辆端配置防碰撞驻车系统(AEB),当远程遥控失联或侦测到前方障碍物时,车辆会主动停车和停止作业,以保障作业安全。3.车辆端1路外置无线全景摄像头采用WiFi数据传输,直连到5G CPE,采用独立锂电池供电,单次续航时长36小时以上。4.车辆端多路摄像头视频流通过多路视频编码器传送到5G CPE,在控制端通过5G CPE接收后,经过工控机输出到控制端的显示器上。5.车辆总线控制信号通过CAN转以太网网关传输到5G CPE的另一组通道,在控制端5G CPE接收后,传递到以太网转CAN网关,和控制端建立数据互通。6.在控制端采用控制器实现操控手柄、启动开关、油门踏板等信号采集和发送。
图传数据链路
技术实现路径:1.通过车辆端外置摄像头实时采集车辆作业现场视频,并通过交换机进行编码,通过5G CPE传输链路传输到控制端的交换机、工控机,最终展示在控制端的显示器上。2.车辆端配置的外置无线全景摄像头,负责整车环境上帝视角拍摄,可以通过WiFi传输到车辆端5G CPE,再通过5G传输链路传输到控制端的交换机、工控机,最终展示在控制端的显示器上。


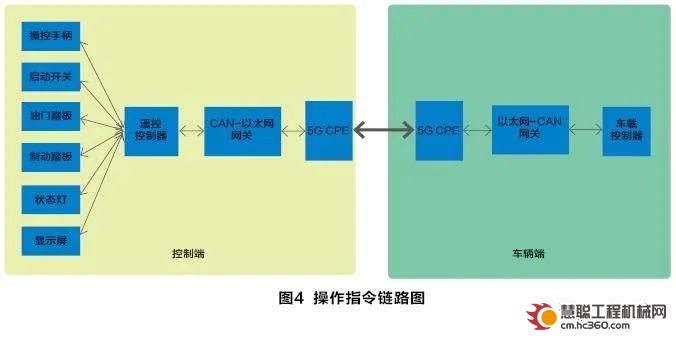

操作指令链路
技术实现路径:1.集成了操控手柄、启动开关、油门踏板、制动踏板、状态灯等设备的遥操作控制端,负责操控指令发送。2.操控指令传输到遥控控制器,然后遥控控制器通过CAN通信传输到CAN转以太网网关。3.在CAN转以太网网关,将CAN信号转成以太网信号。4.以太网信号通过5G传输链路和车辆端的以太网转CAN网关,传输到车载控制器,实现车辆行驶、作业的远程控制。5.车载控制器采集到车辆行驶、作业工况、故障信息等也可以通过上述指令传输链路逆向回传至控制端,在控制端的显示器上展示。
状态显示链路
技术实现路径:1.在车辆端控制器上,采集车辆油箱油量、油耗、大灯状态、发动机状态、震动数据等工况信息,通过CAN转以太网网关传输到车辆端5G CPE。2.车辆工况信息通过5G传输链路,传输到控制端的以太网转CAN网关,CAN数据传输到控制端的状态控制器。3.在控制端的工控机和状态显示面板上,展示车辆的实时工况信息。4.车辆端的震动数据通过动感控制器模拟现场震动情况,并在控制端的动感控制台上体现。
远程操作安全策略
车辆端具备手动/遥控切换功能,且手动操作优先级高于遥控操作,特殊情况下,便于人工介入操作车辆。远程启动发动机条件,基于车辆ACC开的情况,车辆电子通信自检通过,并且无位置移动。在视频传输延时超过500ms,车辆具备保持实时状态不变功能,自动处于待命状态。在数据传输信号中断超过150ms时,车辆行驶和作业自动停止,维持现状,自动进入待命状态。在车辆出现倾侧超过25°时,车辆作业自动停止,自动进入待命状态。
应用趋势
5G移动通信替代无线电
5G移动通信技术出现之前,在4G通信延迟较大的情况下,基于单车遥控技术一般采用无线电通信方式实现近场1km范围内的遥控操作,但作业半径限制、数据传输延迟、传输带宽窄等一直是限制遥操作应用推广的主要原因,在5G时代,借助其高速率、大容量、低延迟等特点,可以实现超远距离遥操作应用,是替代无线电的较好的解决方案。
数字同屏应用
基于5G低延迟技术,可以实现车辆仪表数据实时采集和展示,实现远程模拟车辆作业工况场景,记录每一组总线工况信息,借助3D建模和AR与VR技术,实现车辆作业工况的云平台数字双胞胎展示,强化样机调试,强化研发过程数据化支撑,强化人机交互,优化远程故障诊断等。
机器学习应用
基于5G高速率和低延迟技术,单个车辆可以在不同时段学习,基于健康状态下车辆工况数据日志,逐步培养和训练出健康状态车辆运行的压力、温度、速度、振动频率等工况参数信息,一旦车辆发生参数异常或问题,立即预警,启动单机自主学习和功能恢复。在相同车辆类型之中,可以实现不同车辆间作业流程和行为决策的相互学习,一旦车辆出现故障,可以通过5G移动通信和云平台数据中心,实现不同车辆之间行为控制与决策共享,最大程度的实现车辆利用率最大化。在不同车辆类型之间,可以实现共性作业工况与行为决策的共享,支持云平台不断完善和训练最优作业和行驶决策模型,为不同车辆类型之间相互协同作业提供最优引导和支持。
远程自诊断和恢复
在5G移动通信之前,基于4G移动通信条件下的远程故障诊断面临着诊断数据信息传输的延迟问题,其数据延迟一般迟于现场300ms以上,是车辆发生故障后的后发处理方式,而在5G通信状态下,基于车载总线CAN和以太网,结合预先设计的故障诊断代码与等级定义,可以实现高频数据采集和传输状态下的远程故障诊断,一旦车辆发生异常或问题,故障类代码及时在线上展示,结合机器学习功能,实现车辆同步自我诊断,并可以借助云平台数据中心实施软件版本自主识别和软件下载与更新,实现自动故障恢复。
机群协同作业
基于5G移动通信、3D作业引导、高精度地图、差分定位、机器学习、雷达等技术,实现不同车辆类型之间状态数据交互和识别,实现多类型车辆的安全状态识别、作业最优距离识别、作业安全距离保持、作业过程记录等,为不同类型车辆之间的相互协同作业提供支持。
无人化作业辅助
基于5G移动通信、车载以太网、CAN总线、视频、3D作业引导等技术,辅助单机作业无人化,实现作业任务规划、作业路径设计与优化、作业数据采集和上传、作业过程识别和进度统计、作业质量数据化评测等。同时,支持车辆故障或障碍状态下,实施人工干预远程操作,辅助无人化机群协同作业快速恢复正常状态。
































































































































热门推荐