

ECCV,即欧洲计算机视觉国际会议,是计算机视觉领域中最顶级的会议之一,与ICCV和CVPR并称为计算机视觉领域的“三大顶会”。ECCV每两年举行一次,其专业性、权威性和高含金量广受认可。据官方透露,ECCV2024共接收论文8585篇,创下历史新高,最终录用论文2395篇,接收率为27.9%。

中科慧拓入选的2篇论文研究成果分别为《DiffusionDepth: Diffusion Denoising Approach for Monocular Depth Estimation》,《Generative End-to-End Autonomous Driving》。
Generative End-to-End Autonomous Driving
中科慧拓提出了GenAD,这是第一个将自动驾驶转化为生成建模问题的生成框架,在以视觉为中心的端到端自动驾驶方面实现了最先进的性能,并且效率很高。
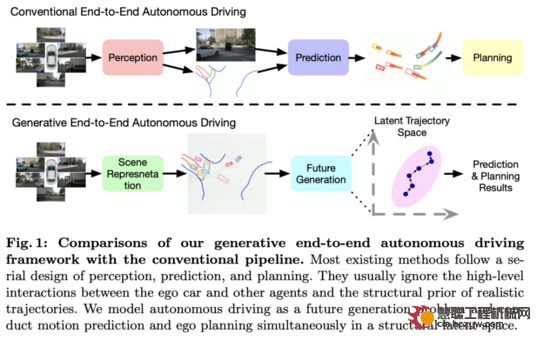
该技术颠覆了UniAD的渐进式流程端到端方案,探讨了一种新的端到端自动驾驶范式,关键在于采用生成式人工智能的方式预测自车和周围环境在过去场景中的时序演变方式。
技术上本方案提出以实例中心的场景表示,首先将周围场景转换为地图和感知实例。然后,使用变分自编码器在结构潜在空间中学习未来轨迹分布,用于轨迹先验建模。进一步采用时序模型来捕捉潜在空间中的代理和自车运动,以生成更有效的未来轨迹。最终,GenAD通过在学习的结构潜在高斯空间分布中采样,并使用学习的时序模型生成未来信息,同时执行运动预测和规划。该模型在城市场景数据集Nuscenes已经取得了SOTA的性能,并在实时性能上远超UniAD。
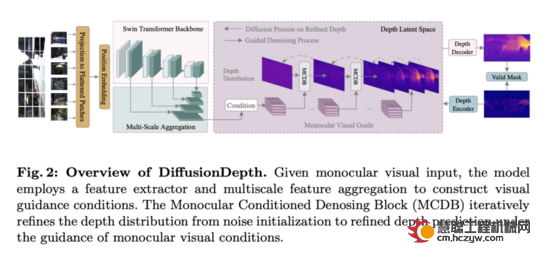
DiffusionDepth: Diffusion Denoising Approach for Monocular Depth Estimation
中科慧拓提出了DiffusionDepth,一种新的单目深度估计方法,将单目深度估计任务重新建模为去噪扩散过程。该模型通过单目RGB图像的特征为条件引导,迭代地将随机深度分布精细化为详细的深度图,克服了生成模型应用于稀疏真值深度场景的局限性。实验结果表明,在KITTI和NYU-Depth-V2数据集上,DiffusionDepth达到了最新的性能。
本次入选ECCV的两篇论文,充分展示了中科慧拓在自动驾驶视觉感知技术领域的强大研发能力。这一成就不仅证明了公司在该领域的领先地位,还彰显了公司科研成果的国际影响力。展望未来,中科慧拓将继续践行“长期主义”战略,平衡技术突破与商业化推进。公司将持续专注于核心技术的深耕与创新,并大力推动量产项目的落地实施,为自动驾驶行业的发展贡献力量。


































































































































热门推荐