

为应对矿山智能化发展需求,推动露天矿山无人驾驶运输领域的技术革新与产业升级,踏歌智行联合国内顶尖科研机构,正式发布“露天矿区无人驾驶场景闭环仿真测试系统MineSim”。
政策引领露天矿智能化风潮
在全球科技革新浪潮迭起、经济竞争日益激烈的时代背景下,我国积极布局产业智能化转型。2024年4月,国家矿山安监局等七部门在联合发布的《关于深入推进矿山智能化建设促进矿山安全发展的指导意见》中提出,到2026年,全国煤矿智能化产能占比不低于60%,煤矿、非煤矿山危险繁重岗位作业智能装备或机器人替代率分别不低于30%、20%;2030年,建立完备的矿山智能化技术、装备、管理体系,实现矿山数据深度融合、共享应用,推动矿山开采作业少人化、无人化。为达成这一目标,政策大力提倡以数字化、网络化、智能化为方向,探索建立国家级煤矿信息大数据分析与共享交换平台。同步推进网络安全和煤矿智能化发展,加快工业互联网和车联网、新一代通信技术、云计算、大数据、人工智能、虚拟现实等现代信息技术在煤炭工业领域的推广应用。
露天矿区无人驾驶场景闭环仿真测试系统MineSim发布
面向露天矿区规模化无人驾驶运输这一重大产业需求,踏歌智行秉持培育新质生产力的坚定理念,积极响应国家号召,携手北京航空航天大学、同济大学、香港理工大学等顶尖科研机构,重磅发布“露天矿区无人驾驶场景闭环仿真测试系统MineSim”。
在当今数字化科研时代,开源数据与共享研究工具已成为推动科技进步的关键因素。MineSim 凭借其强大的开源特性,为行业发展注入了新的活力。它以踏歌智行服务的众多露天矿区海量真实场景数据为基础,构建了一个规模庞大、覆盖全面的露天矿区无人驾驶场景数据库,为矿区自动驾驶方案的大规模场景闭环测试提供了真实、丰富的仿真环境。通过在场景驱动的闭环仿真系统中反复测试,能够快速验证矿区无人驾驶方案的可行性和稳定性,大幅缩短研发周期。
同时,MineSim支持露天矿区无人驾驶安全关键场景生成,可模拟各种极端、复杂和危险的场景,让无人驾驶矿车在虚拟环境中迭代优化,从而提升其在实际运行中的应对能力和安全性。此外,MineSim支持场景为中心的端到端自动驾驶、规划任务神经网络化等矿区无人驾驶研究领域的前沿探索,为研究人员提供了一个功能强大、灵活多变的研究平台,加速相关领域的科研进程,推动露天矿山无人驾驶运输系统向智能化、端到端等先进技术的迈进。
踏歌智行依托大量实际场景提出场景闭环仿真测试方案
踏歌智行针对露天矿区复杂环境中无人驾驶矿车面临的诸多挑战,精心打造了 MineSim 这一专属露天矿场景的闭环仿真测试系统,其卓越的设计和先进的功能,为矿区自动驾驶任务的研究和开发提供了坚实的技术保障。MineSim不仅提供了可重复的测试环境和场景数据,还通过构建矿区场景库、闭环仿真引擎、综合指标评估体系和丰富场景可视化功能,为矿区无人驾驶任务的研究和开发提供强有力的支持。

图 露天矿区无人驾驶场景闭环仿真测试系统MineSim构建过程
1. 矿区场景库:来自真实矿区的大量场景数据组成动静态障碍物场景库,为场景数据驱动的端到端无人驾驶任务提供数据支撑。
2. 闭环仿真引擎:作为系统的核心,仿真引擎负责加载和解析场景库中的场景数据,并依次测试预测-规划-运动控制、端到端无人驾驶算法,实现矿车运动学模型更新和周围车辆状态的交互式更新,确保场景闭环仿真测试的准确性和可靠性。
3. 综合指标评估体系:用于评估无人驾驶矿车在不同场景下的表现,提供安全、平顺、效率、任务完成度等综合量化指标,助力研究人员优化算法和策略。
4. 丰富的场景可视化功能:通过直观的2D和3D可视化工具,用户可以实时观察矿车在仿真环境中的运行状态及各模块数据曲线,便于调试和分析。

图 露天矿区场景闭环仿真测试系统MineSim系统架构
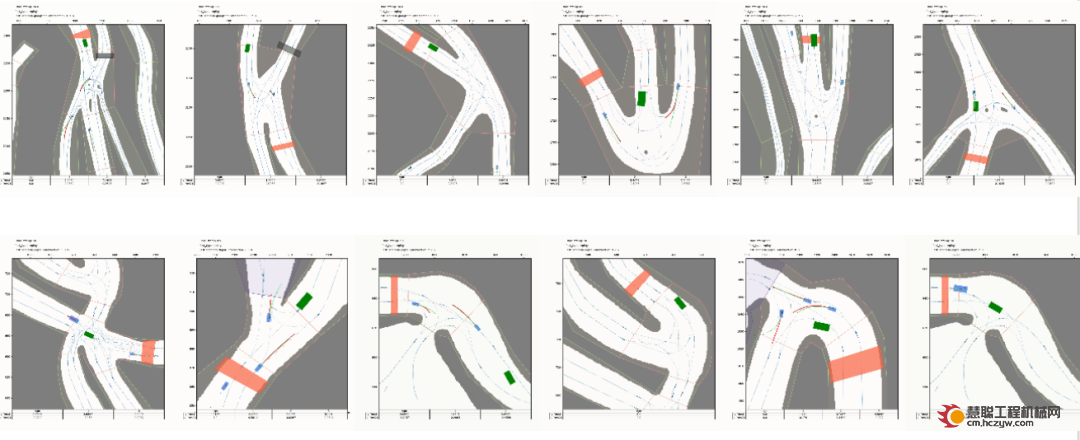
图 来自露天矿区真实场景数据组成场景库
MineSim的独特设计充分考虑了露天矿区的特殊复杂环境,如重型矿用卡车执行机构响应滞后、不规则道路边界、异形交叉路口和频繁坡度变化等非结构化场景特征。踏歌智行整合了大量来自矿区真实运行的场景数据,分别构建了动态障碍物场景库和静态障碍物场景库。这些丰富多样的场景库如同一个庞大的虚拟实验场,可广泛应用于开发和测试无人驾驶矿车与有人驾驶矿车的交互式策略、静态障碍物绕行策略以及基于学习的端到端行驶等各类无人驾驶任务,大大增强了系统的实用性和适应性。
图 场景2D可视化工具
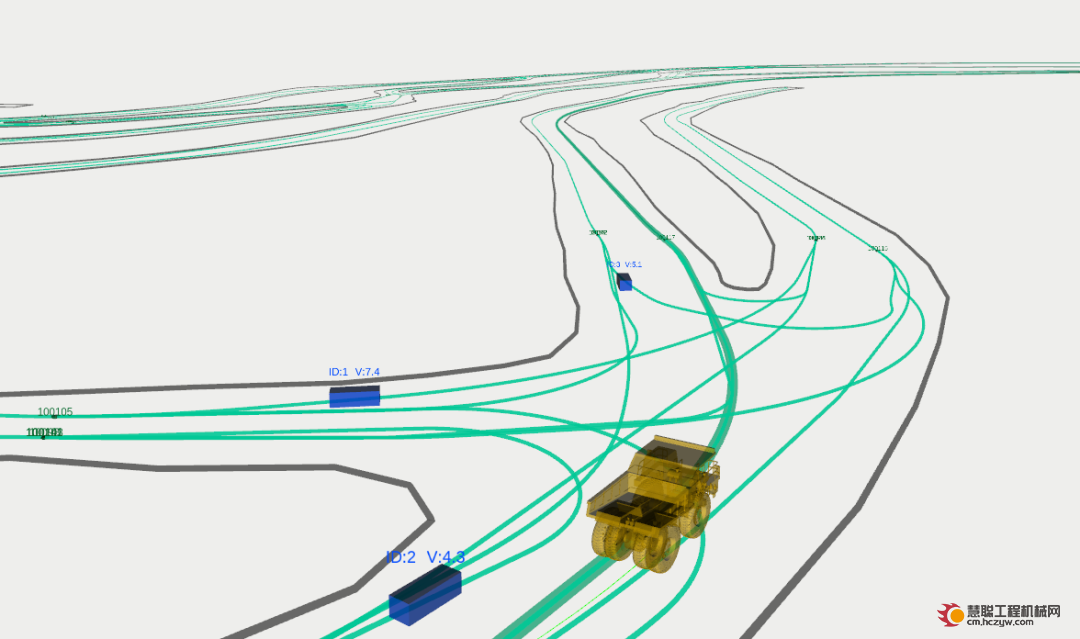
图 场景3D可视化工具
MineSim的广泛应用及影响
MineSim不仅为露天矿区无人驾驶研究提供了可重复使用的测试工具和基准,还为推进非城市和非结构化道路环境无人驾驶研究提供了技术平台支撑。研究成果“MineSim: A scenario-based simulation test system and benchmark for autonomous trucks in open-pit mines”已被交通安全领域顶级期刊Accident Analysis & Prevention收录发表。
此外,MineSim中的场景数据和测试工具已集成至自动驾驶仿真测试公共服务平台——OnSite,并应用于2024年“第二届Onsite自动驾驶算法挑战赛”(第二赛道:非结构化道路场景)。该挑战赛由国家自然基金委指导,由同济大学、国家智能网联汽车创新中心等机构联合主办,吸引了来自全球超过70所大学和机构的300多支队伍参与。

图 学术论文发表
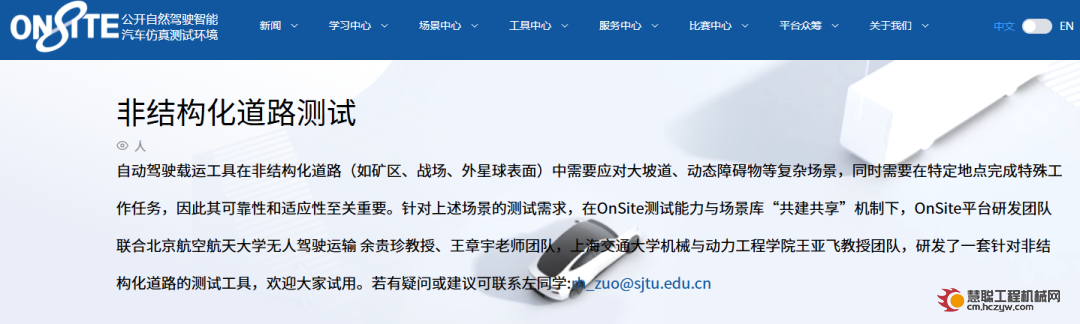
图 自动驾驶仿真测试公共服务平台OnSite非结构化道路测试

































































































































热门推荐