

作者:东北大学机械工程与自动化学院郭立新等
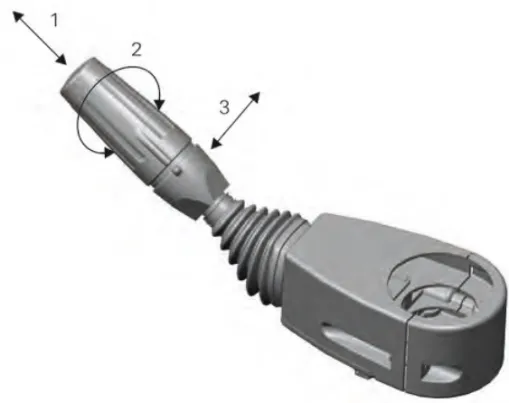
摘要:本文给出了以混凝土泵车各臂油缸长度为参变量的布料机构浇筑过程的轨迹规 划计算方法,在解决布料机构运动学分析的逆问题时,采用了基于多峰值并行搜索的遗传算 法 来求解最优控制优化目标函数,并对施工过程进行了仿真。 关键词:混凝土泵车运动学分析最优控制建模仿真逆运算 机电一体化与机器人技术已成为高性能工程建设机械的发展方向。混凝土泵车作为现代建筑业有 效的施工设备,其机器人化及施工控制自动化已逐渐受人们的重视。混凝土泵车布料机构是 基本由回转支撑机构、大臂、中臂、小臂和软管等部分(以折叠式三节臂泵车为例)组成的串 联开链机构,类似结构,目前已有了许多研究[1,2]。布料机构运动学分析与浇 筑点轨迹规划控制要解决的问题:(1)当执行构件的相对转角或各油缸长度给定时,确定浇 筑点的三维坐标位置;(2)当浇筑点的位置给定后,经逆运算反求出各转动件的相对转角或 油缸的长度。 具有冗余自由度空间机构的逆运动学变换,即所谓的臂解,存在着一个以上 的解,这样现象通常称为衰减,对于无穷衰减的臂解问题需采用某些方法加以控制,简单地 固定一个或几个执行机构,从而使逆运算的解在少数有限解内[3]。对于多节臂的 布料机构(4~6节臂),由于其逆运算为多解,故可采用最优控制,即最佳方案为满足某一 最优目标函数的解,来驱动各油缸动作,初步实现布料机构施工控制自动化。浇筑轨迹规划 自动控制基本可分为:(1)点到点浇筑;(2)沿给定直线或曲线浇筑;(3)区域浇筑;(4)斜坡 浇筑;(5)回避障碍。 1油缸长度li与各臂相对转角θi的关系 图1建立了布料机构的空间坐标系,x0y0z0为固定坐标系置于地面,xiyizi(i=1~4)为转台和各杆的局部坐标系,其z轴向外,y轴由右手法则确定。各臂与其驱动油缸均组成一个曲柄滑块机 构,可看为一边长可变的三角形,这样利用三角函数关系可得出以参变量油缸长度li与其 对角αi关系的表达式:αi=g(li)(1)

由于各臂结构尺寸均已确定,通过计算即可得到布料机构的弯板、连杆与其对应臂间所构成三角形的角度,再用式(1)求得油缸杆对应角αi,就可以计算出各臂间的相对夹角θi。由于θi是α i的函数,因此θi也是li的函数,即各臂间的相对夹角θi与油缸长度li有下列一一对应关系: θi=f(li)(2)
根据实际情况确定出式(1)和 式(2)的具体形式,可计算得到图1中各臂间的相对夹角θi与各臂油缸长度li 的对应函数关系,再用多杆机构空间矩阵变换原理,即可建立起以回转台转角和油缸长度作为参变量的浇筑点轨迹的精确关系。这样利用液压系统的油量控制,即可实现浇筑轨迹的规划控制。
为了详细说明式(1)和式(2)的具体形式, 这里仅以大臂与中臂回转处的相对关 系加以说明,如图2。利用式(1)计算出α2,然后计算出∠DBE、边长DE和∠B EF,就获得了θ2与l2的对应关系。同理亦可计算出θ1、θ3与l1、l3 的对应关系。 2浇筑点与各臂夹角的变换关系 由于布料机构各臂间为转动副,依据机器人运动学原理,可得到各臂间的矩阵变换关 系,其第i坐标系至第i-1坐标系的变换以齐次坐标 的4×4矩阵表示[4]。对于 多节臂泵车布料机构,用齐次坐标变换矩阵表示为: ri=T0,ii(i=4,为3节臂)(3) 式中:T0,i=Tj-1,j;(4) i [0,0,0,1]T; ri=[xi,yi,zi,1]T为i杆上的齐次 坐标点; T 0,1、T1,2、T2,3和T3,4--分别为回转机构与基础坐标系、大臂与回转机构、中臂与大臂以及小臂与中臂的变换矩阵。 则式(3)可表示为 : [x4,y4,z4,1]T=T0,4[0,0,0,1]T(5) 将图1中结构的参数代入式(4)中,就可以计算出系统的变换矩阵T0,4。

式中:d和Li(i=1,2 ,3,4)--回转台和各臂杆的结构参数为定值。
至此,利用式(2)和式(5),在油缸长度li与 回转机构转角β给定时,即可实现浇筑过程的定点主动控制。 3逆问题求解及最优控制建模与仿真 3.1逆问题 布料机构运动学分析的逆问题,即由浇筑点的三维坐标(x,y,z)反求出油 缸 长度li(或各臂相对转角θi)与回转机构转角β。其各油缸长度与回转机构的转角的函 数关系由下述过程确立。 当浇筑点的空间坐标(x,y,z)给定后,利用式(5)和式(6),即 可建立起浇筑点与各部件转角β和θi的关系。

式(7)是关于布料机构各执行件的转角关系式,为了以各 油缸长度l i和回转机构的转角β为变量参数,需将式(1)和式(2)的具体形式代入式(7),形成以油缸 长度li和回转机构的转角β为变量参数的方程组。
由于式(8)的解为多解,特别是当布料机构的臂节数较多(臂节数n=4~6) ,自动控制施工作业,浇筑点沿某些设定轨迹的离散点移动时,即使是相临的两个浇筑点, 经过式(8)的多次迭代求解,各臂油缸伸缩量的变化量可能出现较大解,而导致姿态变化时 间较长,及振动较大等问题。因此本文在对布料机构施工控制采用了最优控制。 泵车布料 机构沿浇筑轨迹移动时,其目标函数设定为:各臂油缸伸缩量最大者最小。当然也可用各油 缸驱动时间、或臂间转角作为衡量目标,以及最小能量原理等建立优化目标函数。 3.2最优控制建模 油缸伸缩量最大者最小的目标函数表达 式为: minf(β,l1,l2,l3)=min{max(|Δl 1| ,|Δl2|,|Δl3|)}(9) 利用式(9)所实现的控制,对某一 区域浇筑时,可在一定程度内维持整个布料机构姿态相对稳定。本文轨迹规划最优控制的目标函数采用了惩罚函数和加权法建模,即以式(9)为目标,以浇筑点的空间几何位置作为约束函数。这样优化目标函数变为: minf(β,l1,l2,l3)= min{max(|Δl1|,|Δl2|,|Δl3|)+A(|fx|+|fy|)+B| fz|}+Cξ(b1,b2,b3) (A、B、C为惩罚系数)(11) 式中:fx=φ(β,l1,l2,l3)-x; fy=ω(β,l1,l 2,l3)-y; fz=ψ(β,l1,l2,l3)-z; Δl1,Δl2 ,Δl3,为连续两个浇筑点所对应各臂油缸伸缩量的差值。ξ(b1,b 2,b3)为油缸长度边界条件控制函数,当油缸长度超过边界条件 定义的范围时对式(11)进行惩罚,即有ξ(b1,b2,b3)=1,否则等于0。 由 于实际施工中布料机构各臂同时运动,为了尽量减小哥氏力的影响,本文又对油缸伸缩量加 权 法处理,这样最终的优化目标函数为: minf(β,l1,l2,l 3)=min{a|Δl1|+b|Δl2| +c|Δl 3|+A(|fx|+|fy|)+B|fz|}+Cξ(b1,b2,b3) 并给定式(12)中有a>b>c>0关系,其目的是给大臂一个较大的系数,小臂给较小的系数,以尽量减少大臂油缸的伸缩量。 由于实际施工作业,对浇筑点坐标(x,y,z) 中的z值要求不是很严格的情况下,可设定一个变化范围均为合理浇筑高度,替换式(11)和式(12)中的fz值,故也可建立以下规则:{img06} 式中:D--惩罚量; Zmax--设定高度 式(11)和式(12)是一个以回转机构转角和油缸长度为参变量的最优控制目标函数,属于非 线性隐函数,用常规优化方法求解,不易获得全局最优解。 本文利用改进的遗传算法 [5]对上述优化模型寻优求解。由于该方法是一种随机搜索的优化方法,具有求解多变 量、非线性的优化问题,因而可以很好地解决本文轨迹规划中具有冗余自由度的臂解问题。 3.3最优控制仿真 根据上述分析过程,本文以式 (12)为泵车布料机构轨迹规划的最优控制的优化目标函数,对某一给定区域进行浇筑过程的 最优控制仿真。首先设定作业浇筑区域,然后将浇筑区域自动离散成点的数组集合作为浇筑 点集合,再调用优化目标函数求解。布料机构结构参数:d=2.0,L1=0.2,L2=5.4,L3=6.8,L4=5.2,浇筑区域为一矩形区域。仿真结果如图3所示,图中(a)、(b)、(c)、(d)分别为三维轴测图、ZX面、ZY面、XY面的投影图。

4结束语与讨论 本文以各臂油缸长度为参变量 对混凝土泵车各执行机构进行运动学分析,给出了布料机构浇筑过程的轨迹规划计算方法。在解决布料机构的逆运动学分析问题时,采取了(多目标)最优控制,并用基于多峰值并行搜索的遗传算法解决机器人学的臂解问题,实现了泵车布料机构浇筑作业时按设定轨迹的自 动最优控制。 有待完善的问题:(1)对于多节臂的布料机构做大距离移动时,需进行各臂间的姿态调整以降低系统的振动幅度;(2)泵车浇筑过程的自动化还应考虑布料机构的自动回避障碍和各臂同时动作时与外界可能发生的干涉问题。这些问题处理需建立许多规则来不断完善。































































































































热门推荐