

近日,易控智驾技术团队在国际知名的Argoverse 2运动预测挑战赛中,凭借自主研发的联合轨迹预测框架,斩获运动轨迹预测榜单全球第一。
Argoverse 2运动预测挑战赛所依托的Argoverse 2 Motion Forecasting Dataset,已被国际广泛视为自动驾驶领域运动预测的重要基准数据集之一。该赛事是全球自动驾驶领域的重要赛事,吸引了众多顶尖企业和研究机构参与,共同应对自动驾驶中的技术挑战。Argoverse数据集评比包含7项技术指标,本次挑战赛中,易控智驾团队在其中的关键指标——avgBrierMinFDE上表现优异。
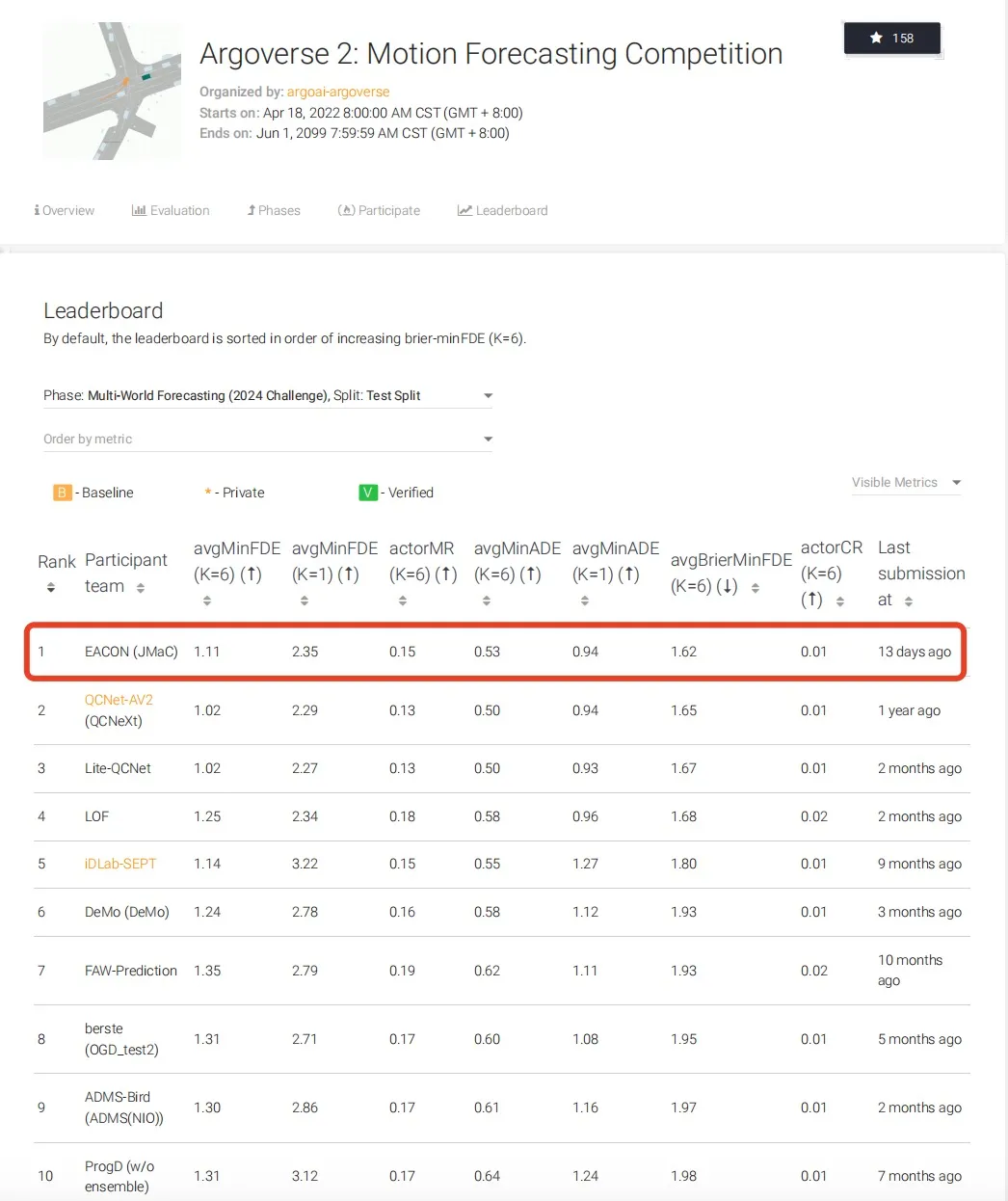
Argoverse2运动轨迹预测挑战赛排名情况
运动轨迹预测在自动驾驶技术中占据核心地位,它如同自动驾驶车辆的“未来之眼”,通过精准预测周围车辆、行人及障碍物的动态变化,为车辆提供及时、准确的决策依据,确保行驶安全,优化行驶路径,提升交通效率,是自动驾驶技术实现智能化、安全化、高效化行驶的关键所在。
近年来,许多轨迹预测模型已被提出,但仍有诸多难点在既有方案中未被充分解决。例如,目前的方法在处理交互场景时精度偏低,主要原因在于联合预测需要同时考虑所有目标物的预测轨迹,这增加了解空间的复杂度。此外,联合预测的结果依赖于所有目标物的稳定和可靠的预测输出,以确保最终结果的稳定性。
加之,与城市道路不同,矿山场景缺乏明确的交通规则和车道线约束,导致车辆驾驶行为更加自由。此外,矿山车辆通常宽度在5米以上,占据空间较大,因此准确的行为轨迹预测是确保安全生产的必要条件。这对轨迹预测任务,特别是在多车作业的开放区域内,对预测精度提出了更高要求。
对此,易控智驾团队自主研发的结合Transformer的多车交互场景特征编码和轨迹解码结构,可有效解决现有轨迹预测技术的痛点。此外,易控智驾在轨迹预测算法中创新性地引入了可信度监督机制,以及结合了可信模态选择的循环解码,可以更好地提升预测准确度,并针对性解决矿山场景需求。
未来,易控智驾将把此项创新技术应用到矿山自动驾驶的实践中,以进一步提升矿山自动驾驶的运行安全与运行效率,助力传统矿业向智能、绿色、高效、安全的现代化矿业转型升级。
































































































































热门推荐