

摘 要:介绍了平地机的作业方式,应用I-DEAS软件构建了其主要部件的数据关系。通过给出合适的输入函数,在进行三维图像仿真的同时,得出了铲刀随时间变化的加速度曲线,这对平地机动力学分析及其他工程机械仿真和动力学分析都有着重要的指导意义。
1、问题的提出 平地机是一种以刮土铲刀为主,配有其它多种可换工作装置,在土方工程中进行整形及平整作业的筑路机械。其结构形式以自行式、液压操纵为主,刮土铲刀比推土机推土铲刀具有更大的灵活性,可同时完成铲土、移土及卸土工序,是一种连续作业的多用途的铲土运输机械。工作装置包括回转铲刀、松土耙、前推土板和重型松土器。其外形如图1所示(下图为中联重科生产的PY190平地机外形图):

图1 PY190平地机外形(主要部件)
1、前机架;2、铲刀摆动油缸;3、摆架总成;4、左(右)升降油缸;5、松土器总成;6、松土器油缸;7、平衡箱总成;8、铲刀;9、回转圈;10、牵引架;11、推土板;12、推土板油缸 在工作装置中,松土耙和推土板主要通过松土器油缸和推土板油缸控制。铲刀为主要工作装置,其运动由回转圈、左(右)升降油缸和铲刀摆动油缸等控制,其作业方式的多样化决定了其运动的复杂性和操作的难度大。因此,在三维建模设计完成后,对其机构进行仿真,其意义在于: (1)检验机构的运动状态能否达到设计要求; (2)检验机构在运动过程中,各运动构件之间、运动构件与机架之间是否会互相干涉,从而及时修改,避免在实际装配和试验过程中发现问题。造成不必要的经济损失; (3)平地机的工作机构具有非常复杂的空间运动。实际上,靠常规试验手段要测出各零部件的运动状态、速度、加速度是非常困难的。而应用I-DEAS软件的仿真分析模块可作到这一点,这对我们进行机构优化设计提供了很好的帮助。 本设计项目采用I-DEAS软件,设计的内容还包括整体外观工艺美术造型设计和结构件的有限元分析等。由于时间关系,本文仅着重讨论平地机机构仿真应用,其他内容将在另外有关报告中阐述。
2 平地机机构仿真运动模型的建立 平地机机构仿真包括工作机构的仿真和平地机驱动机构的运动仿真,其过程为: (1)完成平地机各大部件中各个零件的实体模型建立。针对平地机零部件比较多的特点,整个建模过程采用TEAM管理,即将平地机各零部件的建模分散到课题组各个成员,并用一台配制比较好的电脑作为服务器,零部件建模完成后入库(check out)并装配起来,进行干涉检查,将检查结果反馈给各部件设计人员,修改后,只需更新库内的部件(Update from library),最后形成完备的、正确的平地机总装配; (2)在装配模块中用“Join all”命令将所装配的各部件结合形成一个与装配等同的零件; (3)在设计模块中建立一个适当的长方体作为“ground”,并装配到平地机总装配中; (4)在I-DEAS机构设计模块中完成各个所结合零件之间的数据关系。首先“Create ground”,然后在后机架、前桥、平衡箱、前机架与地基之间建立移动副,并将各移动副耦合,设置速度比为1:1。其余的零件与零件之间也用适当的运动副连接。在该运动模型中,共建立了37个运动副,其中包括12个移动副、20个旋转副、4个球绞副和1个接地副。如图2所示:
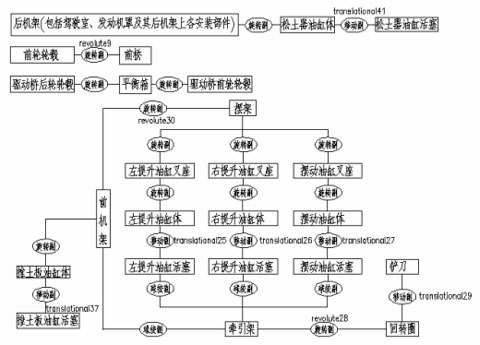
图2 PY190平地机机构仿真各主要部件数据关系图
(5)平地机驱动机构主要是齿轮传动减速机构和链条传动机构,牵涉到的运动部件数量非常多。为此,共建立了47个运动副,其中旋转副22个、齿轮副13个、耦合12对。其模型和数据关系如图3、图4所示:
图3 后桥三维模型图
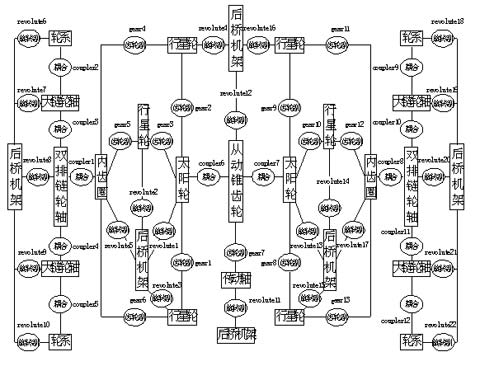
图4 后桥传动系统结构仿真数据关系图
3 平地机机构运动仿真 平地机通过工作装置的调整,使铲刀在各种不同位置上完成各种不同的土方工程作业,归纳起来有四种基本作业方法:(1)铲刀刮土直移:此种作业方式适合场地平整和整型作业,也可用来铺散路面铺筑材料;(2)铲刀刮土侧移:常用于场地平整、路基整型、回填沟渠、铺散或路拌铺筑材料;(3)铲刀机外刮土:用于修整路基、边坡或开挖边沟;(4)铲刀刀角铲土侧移。在本次机构仿真过程中,笔者仅模拟了平地机以下几种动作:(1)铲刀刮土直移;(2)铲刀沿左、右刮90o侧坡;(3)松土器动作;(4)推土板动作。 平地机的传动系统不同于其他工程机械,为了保证作业的平整度,通常采用平衡箱,其原理是:发动机输出的动力经液力变矩器—变速箱输出轴,经万向节传动轴输入三段型驱动桥的主传动装置,主传动装置设有自锁差速器,左右半轴分别与左右行星减速装置(如图3)的太阳轮相连,动力由齿圈输出,然后输入左右平衡箱轮边减速装置,通过重型滚子链轮减速增扭,再经半轮驱动轴驱动左右驱动轮,使平地机获得牵引力。其原理如图5所示:
图5 后桥传动系统图
3.1 输入函数的说明 平地机在作业过程中,首先通过泵和油缸将铲刀调整到所需要的位置,然后进行作业。为了更为实际的仿真平地机的运动,在本例中采用了I-DEAS内置的STEP函数。STEP函数是一种阶梯函数,其函数格式与定义为: STEP(x,x0,h0,x1,h1)
点击此处查看全部新闻图片

3.2 运动仿真 3.2.1 施加运动 运动就是指示机构运动的函数表达式,运动定义了零件如何沿某一特定方向移动。在本例中,共对10个运动副施加了运动(运动副定义如图2所示)。 (1)MOTION1:translational2(前桥与地面) ;(2)MOTION3:revolute9; (3)MOTION7:translational25; (4)MOTION8: translational26; (5)MOTION9:translational27; (6)MOTION10: revolute28; (7)MOTION11:translational29; (8)MOTION12: revolute30; (9)MOTION13: translational37; (10)MOTION14: translational41。 铲刀刮土直移时所施加运动组: MOTION1:-40; MOTION3:-0.022; MOTION7:step(t,100,-2.6,105,0); MOTION8:step(t,0); 其余为0。 铲刀沿左刮90o侧坡所施加运动组: MOTION1:-40; MOTION3:-0.022; MOTION7:step(t,200,2.5,210,0); MOTION9:step(t,300,0.1,310,0); MOTION10:step(t,0.00035,0); MOTION11:step(t,1,950,2,0); MOTION12:step(t,0.001,0);MOTION13:step(t,150,-0.5,160,0); MOTION14:step(t,0)。 铲刀沿右刮90o侧坡所施加运动组: MOTION1:-40; MOTION3:-0.02 MOTION7:step(t,2.6,-2.7,-0.1,-0.00035,-800,-0.001,0)。 纯推土板动作时所施加运动:MOTION13:step(t,0.8,0),其余为0。 纯松土器动作时所施加运动:MOTION14:step(t,1.5,0),其余为0。
3.2.2 仿真结果及其分析 为了更形象、更科学的说明仿真效果,现以平地机铲刀沿左刮90o侧坡为例说明,在此仿真过程中,所有长度单位为毫米,设置Steps(求解步数)为800,End time(结束时间)为2200秒。 下图为上述所给条件下铲刀沿左刮90o侧坡时在四个不同时间点的机构仿真图像:

t=0秒时平地机机构仿真三维图像
t=55秒时平地机机构仿真三维图像
t=11 0秒时平地机机构仿真三维图像
t=308秒时平地机机构仿真三维图像
在t=0秒时:平地机处于初始状态; t=0~55秒时:左右提升油缸和摆动油缸动作及其回转圈绕牵引架回转和铲刀沿回转圈侧向移动,使得铲刀侧向摆动,此时摆动幅度不是很大; t=55~110秒时:左提升油缸达到最大位置停止运动,右提升油缸、回转圈和铲刀继续动作,最终使铲刀继续侧向摆动; t=110~308秒时:同t=55~110秒,左提升油缸停止运动,右提升油缸、回转圈和铲刀动作,使铲刀侧向摆动到最大(即从驾驶室向前看,铲刀下边缘与地面成90度夹角); t=308~2200秒时:平地机各工作装置停止运动,铲刀以左侧摆动到90度后向前运动。 不难看出,此仿真过程与平地机实际作业过程一致,即仿真过程很好的模拟了平地机实际工作效果。根据给出的运动组,利用I-DEAS求解器进行求解,也可以得出铲刀及其他工作装置的位移、速度和加速度随时间变化的规律。图6为铲刀沿左刮90o侧坡时,铲刀随时间变化的加速度曲线:
图6 平地机铲刀加速度随时间变化图
结果分析:由上图可以看出,铲刀在t=100s时,加速度有一个峰值,在t=300s以后,其加速度为0。因为铲刀运动是左右提升油缸、摆动油缸及回转圈和铲刀自身移动的结果,在t<100s时,其各个部件匀速运动,其合成的结果使铲刀加速度波动不大;t=100s时,由于左提升油缸停止运动,从而导致合成速度变化比较大,使加速度呈现峰值;100s
通过分析,我们发现差速器在建模过程中产生了一个偏心质量。通过多次修改,消除了偏心质量后,使得其时间-加速度曲线变为一条水平曲线,符合了设计要求。 因I-DEAS软件对链轮、皮带副的仿真存在一定的局限性。链轮副的运动,链条是处于不运动的状态,为了直观模仿链条的运动,我们单独取出其中的一组链传动组件,采用Animate Hardware(硬件动画)命令播放动画,来直观地获取链条的运动状况。 另外,为使行星减速机构各齿轮之间运动啮合达到最佳状态及获取最精确的变位系数,我们还着重对行星减速机构运动状态进行了仿真分析。利用仿真结果不断地修正各齿轮的变位系数,最终精确获取各齿轮的变位系数。 4.结论 应用机构仿真分析,对平地机的设计工作的帮助主要有以下几点:
1、我们获得了平地机各主要部件,如铲刀、牵引架、工作油缸的运动、速度、加速度曲线,从而对进一步分析其力学性能提供了有力的依据; 2、及时发现和纠正了在建模过程中所产生的误差,将设计错误消灭在虚拟制造过程中,从而保证了实际制造装配过程中没发现一个设计错误,从产品设计到样机装配下线仅用了三个月时间。 3、利用I-DEAS的齿轮建模程序,虚拟制造装配的轮边行星齿轮减速机构,使我们在设计阶段就能非常直观地观察和研究轮边减速器的运动情形,我们不但获得了它的力学状态,尤其是在研究其运动过程时,对齿轮变位系数的精确选择起到了至关重要的作用; 4、通过机构仿真获得的力学性能,为我们后续的有限元分析提供了有力的设计依据。从而使我们平地机产品一投放市场就体现出良好的动力性能和高可靠性。 应用I-DEAS软件对平地机进行机构仿真,是我们用最先进的设计手段对传统工程机械产品进行改进设计的一个成功案例。我们不但获得优美的外观造型,同时产品具有优良的使用性能和高可靠性,其产品开发周期比传统方法缩短40~60%。

































































































































热门推荐