


天津大学两名毕业生在展示参赛作品“多足变胞爬行机器人”
为国家重大专项解决关键元件的制造难题,运用学科前沿技术设计可变形的救灾“利器”,打造遥控“攀爬高手”替代实际生产中的人工操作……这些运用机械学科前沿理念,解决生产、生活中重大实际问题的科研成果全都出自本科生之手。
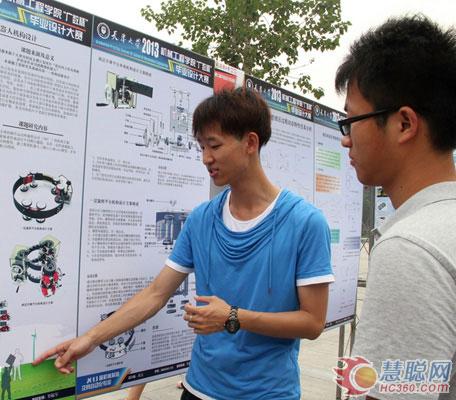
参赛学生黄磊向参观者讲解他的设计原理
6月20日,由天津大学机械工程学院主办的以“科学严谨,追求卓越”为主题的机械类本科毕业设计大赛决赛在天津大学举行。来自天津、河北2省市6所高校的本科四年级学生带着51份机械毕业设计作品同场竞技。
天津大学学生董成林、刘祺通过多坐标混联,创新设计出了一种具有3自由度转头的机器人,突破了我国在非球面光学元件加工方面的技术瓶颈。这款机器人不仅刚度高,精度好,而且工作空间极大,能够对直径达2平方公里的大口径非球面光学元件进行精确抛光,加工后的光学元件具有超高且精确的聚光聚能功用,可为核聚变反应提供巨大能量。据设计学生透露,该设计已进入实体零部件装备、测试阶段,有望在明年投产并直接运用在我国相关核工程项目中。

6月20日,天津大学机械工程学院举办第七届“广数杯”本科毕业设计大赛
多足变胞爬行机器人是天津大学学生甄伟鲲、吕梁、王浩威的参赛作品。他们模仿哺乳动物通过腰腿配合实现灵活运动的原理,在机构中加入由4节结构组成的“腰”,机器人运动时配以腰、腿结构的变形,实现灵活、稳定的运动。设计者之一甄伟鲲介绍说,由于采用了变胞机构,这款机器人能伸能缩还能变形,既能并和成线性,又能伸展成“张牙舞爪”的章鱼形状,而且还能通过手机的无线遥控,在各种不规则的狭小空间里自如运动。“这种机器人将在恶劣环境下抢险救灾中大显身手。”
天津大学学生黄磊针对风电塔筒检测不便问题设计的爬塔机器人也受到了评委的广泛关注。据了解,风电机塔高度一般在50米至100米之间,而且多为锥形,上细下粗。我国目前检测塔筒顶端设备的普遍做法是,在塔筒顶端预先安置滑轮,人在地面上通过滑轮拉动绳索,将检测装置吊至塔筒,费时又费力。他设计的这款机器人分为3节,前两节负责攀爬,通过履带的伸缩,可以自如地适应攀爬过程中塔筒直径的改变;最上方一节是具有120度水平旋转功能的检测机构。如果能用在实际生产中,将能解放人力,实现塔筒检测的完全机械化、远程操作。

河北工业大学学生演示他们设计的步进电机控制系统
本届大赛在第六届的基础上,参赛院校范围由4所扩大6所8个学院,包括天津大学机械学院、精仪学院、化工学院,及河北工业大学、天津理工大学、天津工业大学、天津科技大学、天津商业大学的机械学院。本届大赛共收到参赛作品111件,51件进入决赛。经专家评审组评审,评出一等奖5名、二等奖15名,三等奖31名。
大赛的宗旨是提高本科人才培养质量,突出实践、创新和展示能力,加强毕业设计(论文)工作的过程化和规范化管理,通过本科毕业设计大赛,提高学生的工程与科学素养,形成追求卓越的氛围,培养学生科学严谨的工作作风和实事求是的工作态度。































































































































热门推荐