

高空作业平台作为21世纪一种专用的高空工程机械装备, 目前被广泛应用于船舶、建筑、市政建设、消防、港口等涉及高空作业的领域。可想而知,高空作业平台有着广阔的发展前景。作业安全性和可靠性是高空作业平台的关键性能指标。怎样有效地控制高空作业平台的设计成本,缩短上市时间,同时满足其高性能的需求,成为目前高空作业车市场竞争的焦点。

运想三节臂高空作业平台改良后作业更平稳
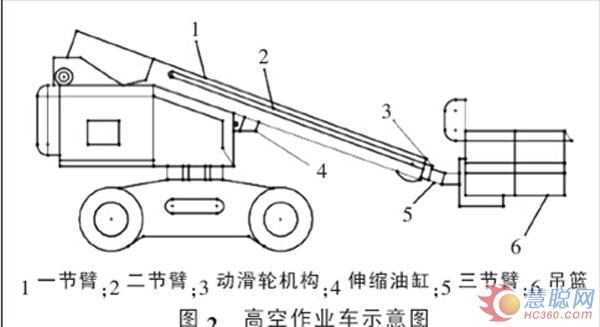
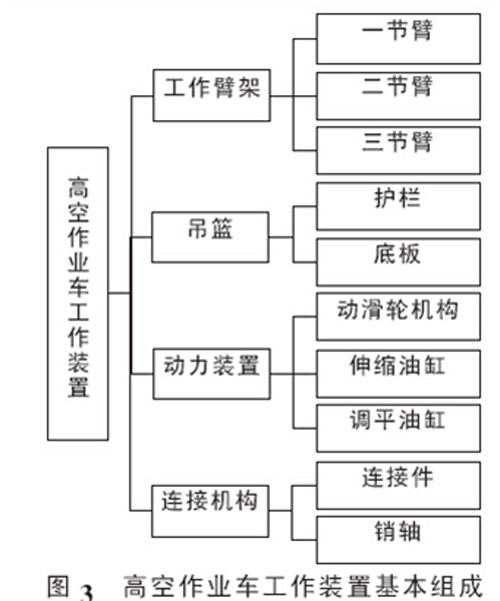
三节臂高空作业平台的实用性确实很强,但很多企业生产出的三节臂高空作业平台作业时都有一个通病,抖动非常厉害!运想重工在生产三节臂高空作业平台时对高空作业平台的转台进行结构分析, 确定转台在危险工况下的应力应变分布情况, 并给出了结构改进方案。采用接触单元法对作业臂进行了结构分析, 全面了解影响高空作业平台结构应力分布的因素。发现工作震颤过程中作业臂的危险区域,以便于对其进行设计改造。高空作业平台作为机电一体化产品,具有系统性、综合性、复杂性的特点,特别是由工作臂及其吊篮构成的工作装置, 承受了高空作业车的载人平台的载荷及作业时的各种外载荷,且内部采用了多种固结方式进行连接, 会产生许多干涉耦合现象,因此,如何获得高空作业平台工作装置的整体性能及工作状况, 以适应其多变且不可预知的工作环境是运想新的三节臂高空作业平台的改良方向。
高空作业平台的工作臂架通过变幅油缸和动滑轮机构,在工作的过程中能形成很多种工况,其中最具有代表性的典型工况如下:
(1)工作臂架变幅幅度为-13°,在吊篮承载额定载荷的情况下工作臂架不完全伸出。
(2)工作臂架变幅幅度为0°,在吊篮承载额定载荷的情况下工作臂架达到最大延伸。
(3)工作臂架变幅幅度为45°,在吊篮承载额定载荷的情况下工作臂架完全伸出。
(4)工作臂架变幅幅度为72°,在吊篮承载额定载荷的情况下工作臂架完全伸出。
在不同的工况下, 工作臂架受到的荷载及荷载的作用点都是不同的, 所以其危险截面的位置和应力集中的部位也是不同的。其中第3 种工况是高空作业车工作过程中的最不利工况,只需在第3 种工况下,对工作臂架第3 节臂及吊篮进行整体性能分析。
运想三节臂高空作业平台改良后作业更平稳
运想三节臂高空作业平台改良后作业更平稳
通过对高空作业车工作装置第3 节臂及吊篮建立三维实体模型,以及对第3 节臂及吊篮在最不利工况下的应力进行计算分析和对最危险截面处的应力应变大小和应力分布进行研究,依据结果得出以下结论:
(1)高空作业车工作装置三节臂和吊篮通过连接件连接的部位应力出现最大值, 在调平油缸与三节臂和吊篮铰接处应变出现最大值, 与在第3 种工况下使用高空作业车工作装置最易发生断裂失效的部位一致。
(2)相较于应力集中处的应力,工作装置余下部位的应力都比较偏小, 应力集中处的应力是最大的。根据对优化前后的结果进行比较可知,该改进方案比较合理。
计算结果为第3 节臂及吊篮进行面向整体性能的有限元优化提供了理论依据,通过计算分析,得到了面向整体性能的有限元最优化设计方案, 在满足强度要求的前提下使高空作业车工作装置的整体性能得到进一步的提升,更加地符合实际的工况。

































































































































热门推荐