

测量机器人变形监测系统特点
测量机器人变形监测系统具有高效、准确、实时性强、结构简单、操作便捷等特点,特别适合小范围区域项目的变形监测。目前测量机器人已经在多种类型工程建筑、项目的运营期变形监测方面,成为首选的自动化技术装备。

施工期隧道主要对隧道收敛沉降以及周边围岩、衬砌结构的受力变形情况进行监测。由于施工现场存在供电困难、网路覆盖差、爆破震动、碎石扬尘等诸多限制,现阶段施工期隧道监测主要为人工监测为主。那么自动化监测在施工期隧道上是否真的毫无施展空间呢?索佳联合中交某单位技术中心在云南某高速公路项目A隧道工程开挖现场进行了测量机器人沉降、收敛自动化监测。
项目概况
该高速建设项目位于云南省境内,线路全长74.78公里,其中由中交某单位承建的A隧道工程是其全线控制工程,隧道左右洞长均超过3000米,最大埋深超过200米,是整个高速项目中最长、地质最复杂的隧道,也是制约该高速建成通车时间的关键要塞。

隧道入口外景
隧道采用山区高速隧道施工最普遍的“新奥法”进行施工,其以喷射混凝土、锚杆支护为主要支护手段,主要施工流程为:钻爆开挖—初期支护—二次衬砌—辅助设施建设。施工方法注重的要点为“少扰动、早喷锚、勤量测、紧封闭”。

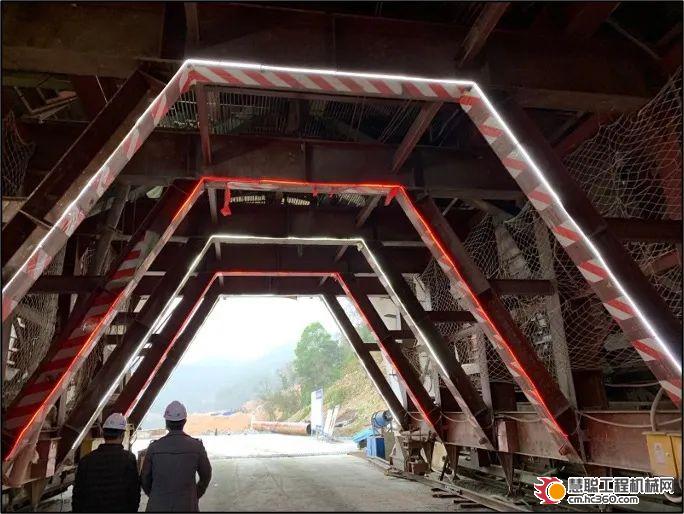
施工期隧道爆破掘进内景
该隧道施工监测此前采用的是第三方人工监测的方式,每天多次对隧道内结构上粘贴的反射片进行测量,以得到拱顶及两腰的沉降、收敛变化数据。
技术痛点及难点
施工期隧道人工监测存在诸多弊端:
1、人工采集结构数据的过程中需要频繁进入掘进区域附近,存在很大的安全隐患,也容易造成测量数据错误,无法保证数据的真实性,也就无法获取真实的围岩变形情况。
2、监测数据采集量大,占用大量的人力物力,数据的处理和传输不及时,不能满足信息化施工管理的需求,也无法及时指导施工。
3、监测预报滞后,现场突发情况难以预测,无法发挥紧急预警的作用。
施工期隧道由于施工过程中存在的大量人员、车辆、设备,加上复杂的地质条件,对自动化监测系的的建设提出了严峻的挑战,主要存在以下几个方面:
1、现场临时设备多、人员活动频繁

现场大型施工器械(挖掘机、台车)
开挖阶段存在大量设备和临时设备及实施人员,比如挖机、铲车、喷浆设备以及挖掘作业人员等,对仪器的安置与防护提出了较高要求。
2、施工流程影响
隧道施工流程较为复杂,比如在掌子面掘进过程中会使用爆破手段,拱架安装及二衬阶段台车会随着施工进度移动等,导致对自动化监测的仪器位置的选择及基准点的位置选择造成了较大困难,比如经常发生由于台车移动的原因导致基准点被遮挡的情况。同时施工期产生的灰尘、滴水等情况对设备也造成一定程度的威胁,爆破的震动和飞石对监测设备的影响也不可忽视。
3、供电供网困难
施工期隧道过程中,当前施工区段附近无法做到电力和网络的覆盖,因此需要使用合适的手段将网络和供电传输到测量机器人的位置来保证监测系统的正常运行。
4、精度要求高
根据工程测量规范中的要求,监测的中误差应小于允许变形值的1/20-1/10,对于采用复合衬砌支护的隧道,围岩变形量按照隧道设计规范要求的最小预留变形量均为10mm,因此目前主流的隧道收敛和拱顶沉降监测的精度设置为0.5-1mm,对设备的测量精度提出了很高的要求。
5、隧道内部岩性复杂,风险高
该隧道主要以V级围岩为主,V级围岩占比70%。隧道穿过多段破碎带、断层破碎带、围岩交界面。隧道内岩体破碎、松散,滑坡堆积体等不良地质密集、范围大,对施工人员和监测人员以及设备安全性提出很大的挑战。
解决方案
为了克服现场的种种困难,索佳技术人员与中交技术中心人员及项目部技术部商讨测量机器人自动化采集可行性方案,最终商讨制定出如下设备方案:
一、测量机器人:
硬件使用索佳的NET05
0.5秒测量机器人,其具备对棱镜和反射片的自动照准和跟踪测量能力,测距精度0.8mm+1ppm(棱镜)/0.5mm+1ppm(反射片),完全满足现场沉降和收敛观测的精度需求。同时其具有IP65防护等级和倾斜改正功能,适应现场恶劣的监测环境,配合专用的监测终端可实现在隧道内部的无人值守的自动化观测。
此次试点项目监测终端采用的是某品牌的监控终端,其要求的供电电压为12V,具备无线网、RJ45、4G等多种网络接入方式,数据支持本地存储。同时具备IP65的防护等级,支持多样化配置,满足复杂的现场条件。

二、网络电力设备
网络:
隧道实施的现场没有公网环境,最终敲定使用4G路由器+无线网桥的方式来进行供网。不使用光纤的原因,一方面是现场车辆人员众多,因此容易导致光纤的损坏。另一方面是测量机器人在隧道内部的自动化观测距离一般不宜超过300米,在隧道掘进的过程中,测量机器人的位置需要根据现场施工进度前进,光纤延长转站困难。
无线网桥可以在发射端将网络信号转化为无线电磁波信号抛射到空气中,并在接收端接收电磁波信号转化为网络信号,十分适合在难以安装网络线路的环境下的数据传输。

某品牌4G路由器
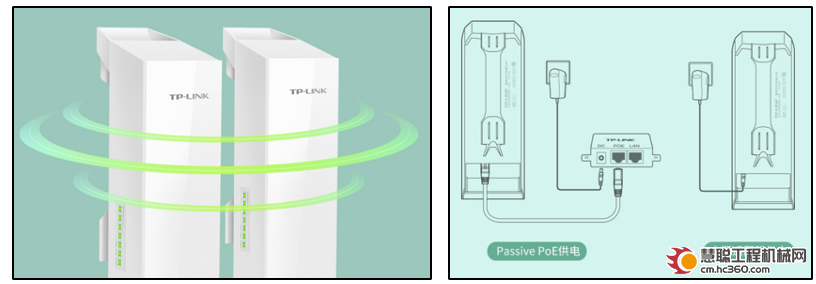
某品牌无线网桥及其接线方式
供电:
由于隧道在掘进过程中,电力设备的敷设是较为滞后的,从通电处引电一则线路较长,二则施工现场容易导致线路的损坏。
现场的供电设备有两种选择,第一种是使用施工台车上的电源进行供电,台车会随着施工进度的前进而跟着前进,此种方法的弊端是台车会经常移动,需要预留一定长度的电线,此外还需要注意现场的线路防护,避免电线被损坏造成人员伤亡事故。
第二种选择是使用大容量锂电池供电,测量机器人控制终端和无线网桥等设备可以使用12V的电池供电。电池可以直接放置在设备处,无需敷设电力线路。一般情况下,100ah的锂电池可以满足测量机器人连续一周以上的使用。

三、其他辅助设备
为保证测量机器人在隧道内的稳定运行,需要使用定制的不锈钢支架将其安装固定在隧道内部,支架的脚部应采用膨胀螺丝固定的方式,以适合测量机器人的转站。此外,为保证无线网桥、锂电池的野外使用安全,定制了防水保护罩,避免隧道内部水汽凝结后对其的影响。在必要情况下,也可以对监测棱镜定制保护罩,现场碎石冲击或者器械的损坏。
工作流程
隧道监测的基本流程应包括选择设站点、建立控制网、网络电力及防护建设、安装监测点(采集初始值)、自动化观测、设站点转站等。
实施流程:
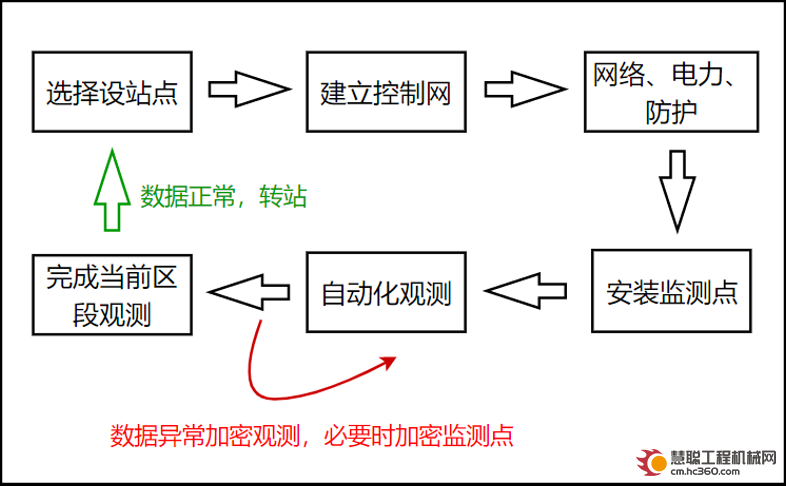
测量机器人施工期隧道自动化监测流程
✓
步骤一
在已完成初砌的区域,选择合适的通视地点作为测量机器人的设站点,该地点应不影响后续施工,同时视野能保证对刚完成爆破掘进及刚完成初砌的结构的监测需求,使用定制的脚架安装测量机器人。
✓
步骤二
选取工作基点建立控制网,工作基点可以使用隧道施工的基准点也可以使用隧道施工的基准点引测点,基准点应能满足测量机器人的后方交会要求。
✓
步骤三
安装配套的网络和电力供应设备和对应的防护设备。
✓
步骤四
在需要监测的目标点上,根据现场条件安装反射片或者监测棱镜。监测棱镜的朝向应尽量朝向测量机器人的位置。在安装完成后,使用测量机器人对所有的监测点采集初始坐标,作为监测隧道表面变化量的依据。此时监测点初始坐标和基准点坐标在同一坐标系下。
✓
步骤五
配置监测周期、监测限差、预警方式等,进入自动化采集过程。
✓
步骤六
自动化采集过程中的数据若符合设计参数,未发出预警,则可以根据隧道掘进进度进行转站。若自动化采集过程中发生预警现象,则需要立即与施工方进行沟通,暂停施工排查原因,同时应加密测量机器人自动化的采集频率,必要时加密观测点的密度。
设备安装位置:
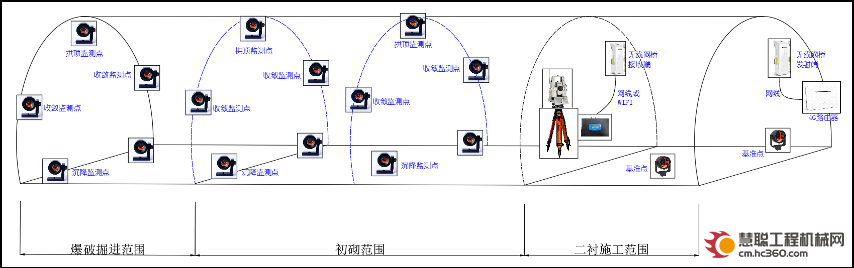
施工期隧道监测设备布设示意图
监测棱镜在隧道内部可以按照每个断面5个监测点布设(其中两腰的和顶部的监测点可以计算出隧道的收敛和沉降情况)。隧道内部断面间隔可以按照5-10m间隔设置(按照围岩等级设置),在地质条件较差或者变形比较严重的区域加密监测点的布设。

隧道掌子面附近
安装监测棱镜

测量机器人架设
监测数据处理:
隧道按照监测点位的数量一般配置监测周期为30分钟或者1小时一期,在监测软件上设定好观测时间后,控制终端监测即可按时发送指令,控制测量机器人测量。测角数据和测距数据实时通过网络发回给服务器上的监测软件,监测软件采用先进的平差算法进行解算,得出隧道内部点位的三维空间坐标变化,在发现数据超出设置的预警值时,及时通过邮件、微信、电话等通知相关监测人员。
,时长01:26测量机器人现场自动采集数据
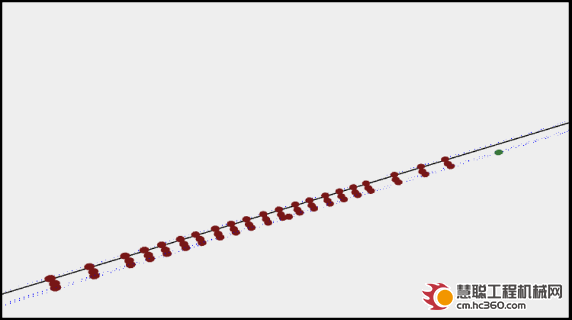
隧道监测点位散点图
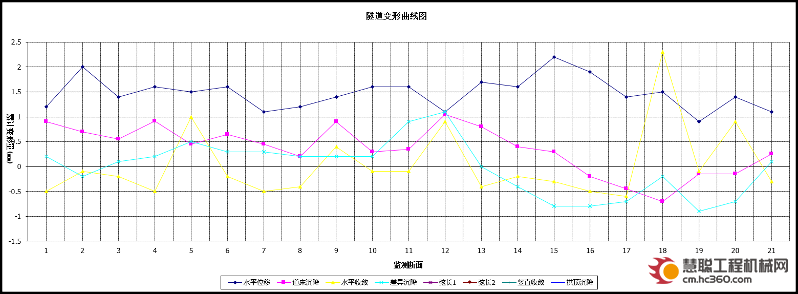
某时刻隧道断面累计变形曲线图
该技术试点项目使用索佳测量机器人及配套监测控制终端,搭配新颖的网络传输技术,定制了多种应对现场的配件工具,克服了隧道施工期内部复杂多变的环境问题。实现了集数据采集、处理、分析、报表、预警于一体的无人值守自动化变形监测。
本系统具有可复制可推广性,相对常规的收敛传感器和人工测量,既提高了监测数据的准确率和效率,又减少了监测人员在现场的投入和作业风险。本系统经过此项目的长时间现场比测,监测数据与人工观测数据、设计数据均非常吻合,效率高精度可靠,为隧道的掘进进度做了一定程度的贡献,受到项目部技术中心高度好评。

隧道于2021年顺利贯通































































































































热门推荐